
”计算机视觉 机器人学 算法 图像识别“ 的搜索结果
针对MiroSot系列足球机器人视觉子系统存在的误识别、目标丢失两方面问题,提出了一种在保持原硬件组成系统不改变的情况下,将手工采集改为自动采集和对采集图像进行放大处理的解决方案,并用Visual C++实现了相关的...
计算机视觉作为人工智能领域的一个重要分支,近年来在...从人脸识别、自动驾驶到无人机航拍,计算机视觉技术已经深入到我们生活的方方面面。本文将带您走进计算机视觉的世界,了解其基本原理、应用领域以及发展前景。
煤矿救援机器人环境目标图像识别
标签: 行业研究
针对标准尺度不变特征变换(SIFT)算法存在搜索视觉图像中关键点出现计算冗余和目标识别实时性差的问题,提出了一种改进的SIFT算法,并将其应用到煤矿救援机器人的环境信息感知和目标识别匹配中。该方法以马氏距离代替...
1.背景介绍 计算机视觉(Computer Vision)是人工智能领域的一个重要分支,主要关注于计算机通过图像或视频来理解和解释人类世界中的...本文将从计算机视觉的角度深入探讨机器人学的核心概念、算法原理、实例代码和...
针对机器人视觉系统对抓取物的模糊识别问题,参照人眼一脑识别对象的过程,建立了包括区域分割与模糊识别两个环节的识别算法。以视觉图像的灰度与色度特征作为区域分割与模糊识别的依据,从灰度、色度及形体特征上...
为解决煤矿救援机器人在发生灾害后光线不足、煤尘粉尘严重等造成视觉系统中图像不清晰、画面模糊以致障碍物形状无法识别问题,通过实验模拟煤矿井下光照条件,在光照充足、低照度以及零照度3种不同光照条件下采集...
本文将深入探讨C++在图像处理与计算机视觉领域的应用,包括核心概念、算法原理、实际应用场景以及工具和资源推荐等内容。 1.1 图像处理与计算机视觉的区别与联系 图像处理和计算机视觉虽然有很多相似之处,但它们...
这项工作研究了基于视觉的移动机器人目标识别和自动避障方法,解决了移动机器人可以在复杂环境中移动和识别目标的问题。 构建Mecanum轮移动平台,并配备Kinect传感器和激光测距仪传感器,将数据传输到主机以进行信息...
使用单片机方案的简单图像处理在很多情况下有应用,比如颜色的跟踪识别,给智能控制的机器人带来的视觉系统,能使设计更加的智能化。在各种机器人大赛中都有图像处理应用的身影,低调却非常的有用。虽然只是对图像的...
针对Robocup类人组比赛的特殊环境,为了识别比赛双方机器人,并克服光照变化、图像扭曲等问题给识别目标带来的干扰,选用尺度不变特征变换(SIFT)算法进行特征提取。由于SIFT算法的实时性差,提出改进的PCA-SIFT目标识别...
计算机视觉实际上是一个跨领域的交叉学科,包括计算机科学(图形、算法、理论、系统、体系结构),数学(信息检索、机器学习),工程学(机器人、语音、自然语言处理、图像处理),物理学(光学),生物学(神经科学...
得益于人工智能,机器学习和计算机视觉等融合技术的进步,机器人每天都能看到,分析和做出更像人类的决策。开发此类视觉分析逻辑涉及实现解决方案,这些解决方案可以确定对象的方向,处理移动的对象并执行导航。为此...
目标识别算法 目标跟踪算法 特征点提取算法 立体匹配算法 点云重建算法 点云配准算法 数据记录和表格输出 目前Svaf仅由个人维护,仅支持Windows平台。任何Svaf源码的使用都需要遵守BSD2相关开源许可。 Why Svaf 立体...
在当今社会,需要处理的信息越来越多样,其中视觉信息便占了很大一部分,处理好多面积的视觉信息更是一大重点。在机器人方面也是如此。但限于当代技术,对这种问题的主要解决方案仍是将多面积图像先处理成多方面的...

图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术。图像识别是人工智能的一个重要领域。主要的图像识别方法有基于神经网络的图像识别方法、基于小波矩的图像识别方法等。...
机器视觉需要用到图像处理库,有很多免费且开源的第三方图像库可以用,如十分著名的OpenCV,有C++,JAVA,PYTHON的版本,它包含了很多现成的函数,可以处理图像的形状,颜色,大小,图像文件保存,找相似图像,物体...
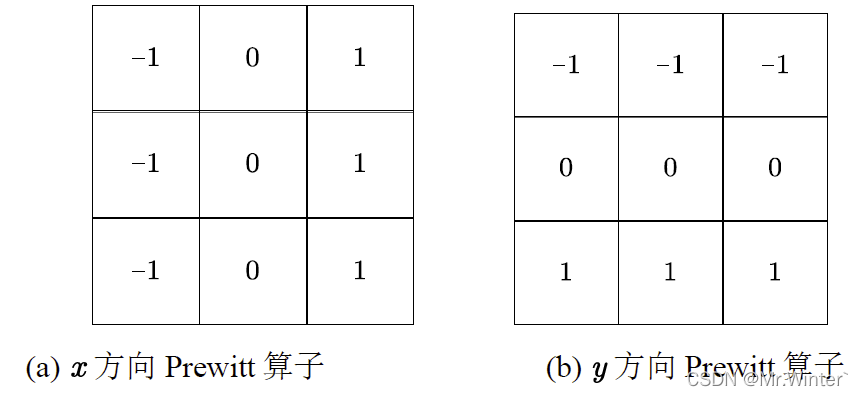
边缘检测是计算机视觉领域中的重要任务,它能够提取图像中的边缘信息,为后续的图像分析和处理提供基础。通过了解边缘检测算法的原理和应用,我们可以更好地理解计算机视觉的工作原理,并探索如何改进和优化边缘检测...

机器视觉需要用到图像处理库,有很多免费且开源的第三方图像库可以用,如十分著名的OpenCV, 有C++,JAVA, PYTHON的版本, 它包含了很多 现成的函数,可以处理图像的形状,颜色,大小,图像文件保存,找相似图像,...
计算机视觉既是工程领域,也是科学领域中的一个富有挑战性重要研究领域。计算机视觉是一门综合性的学科,它已经吸引了来自...其中包括计算机科学和工程、信号处理、物理学、应用数学和统计学、神经生理学和认知科学等。
采用本文提出的将机器人手- 眼视觉与超声波测距相结合的检测装置, 以及融合二维图像信息与深度信息进行工件识别与抓取的方法,具有算法简单、计算量小、可靠性高等特点
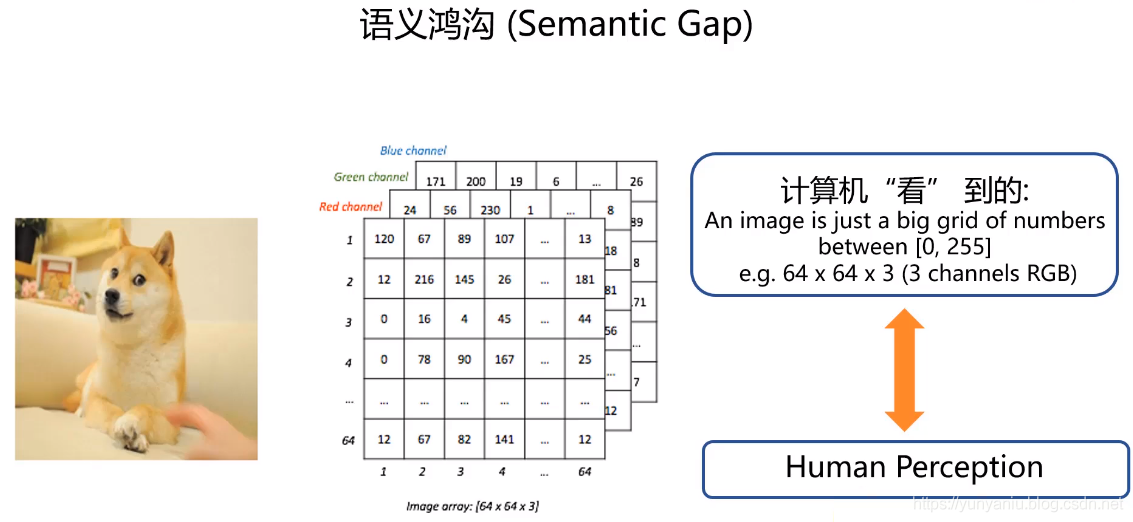
1. 计算机视觉的概念 计算机视觉就是用各种成像系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释。计算机视觉的最终研究目标就是使计算机能像人那样通过视觉观察和理解世界,具有自主适应环境的...
详细介绍开源计算机视觉库OpenCV。


环境感知算法获取环境各种数据,通常指以机器人的视觉所见的图像识别等,当然还有定位机器人的方位——slam,对于不同的机器人而言所处的环境各有千秋。其实我们常见的扫地机器人就是一种定位机器人(slam算法控制的...
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地